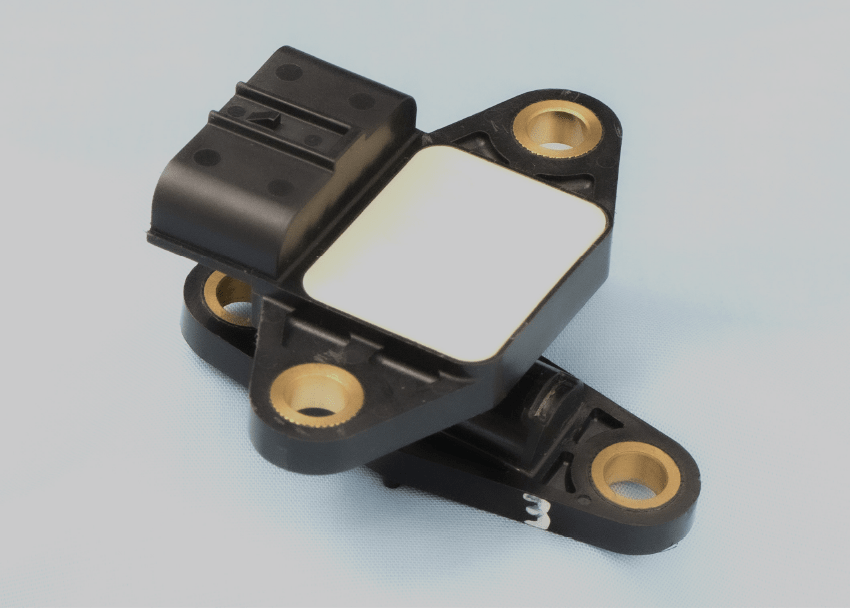
加速度、角速度から車体の姿勢を検出する慣性センサーを紹介します。
回転/ポジションセンサーで培った高信頼のパッケージング技術を踏襲し、
また、車両ECUでの信号変換負荷を考慮しCAN出力での対応も可能です。

2輪車、農建機など向けに開発中で、様々な環境に最適なセンサーを提供するためのIMUをラインナップしています。
車載向けでは、機能安全(ISO26262)を考慮したASIL-B対応をしています。
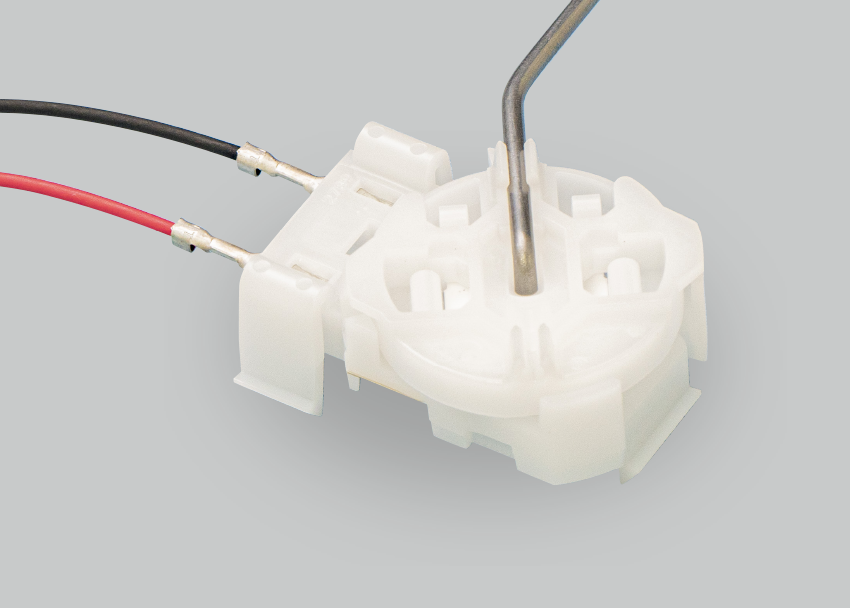
農建機向けでは、簡単に設置ができるよう無線式にも対応しています。
また、内部に温度センサーも入っているため、加速度や角速度の他に温度も出力することが可能です。
| 特徴 | TYPE名 | 軸数 | 給電方式 | 出力方式 |
| 2輪車向け | IM-1 | 6軸 | 有線 | CAN |
| 農建機向け | IM-2 | 6軸 | 有線/電池 | 有線/Bluetoothなど |
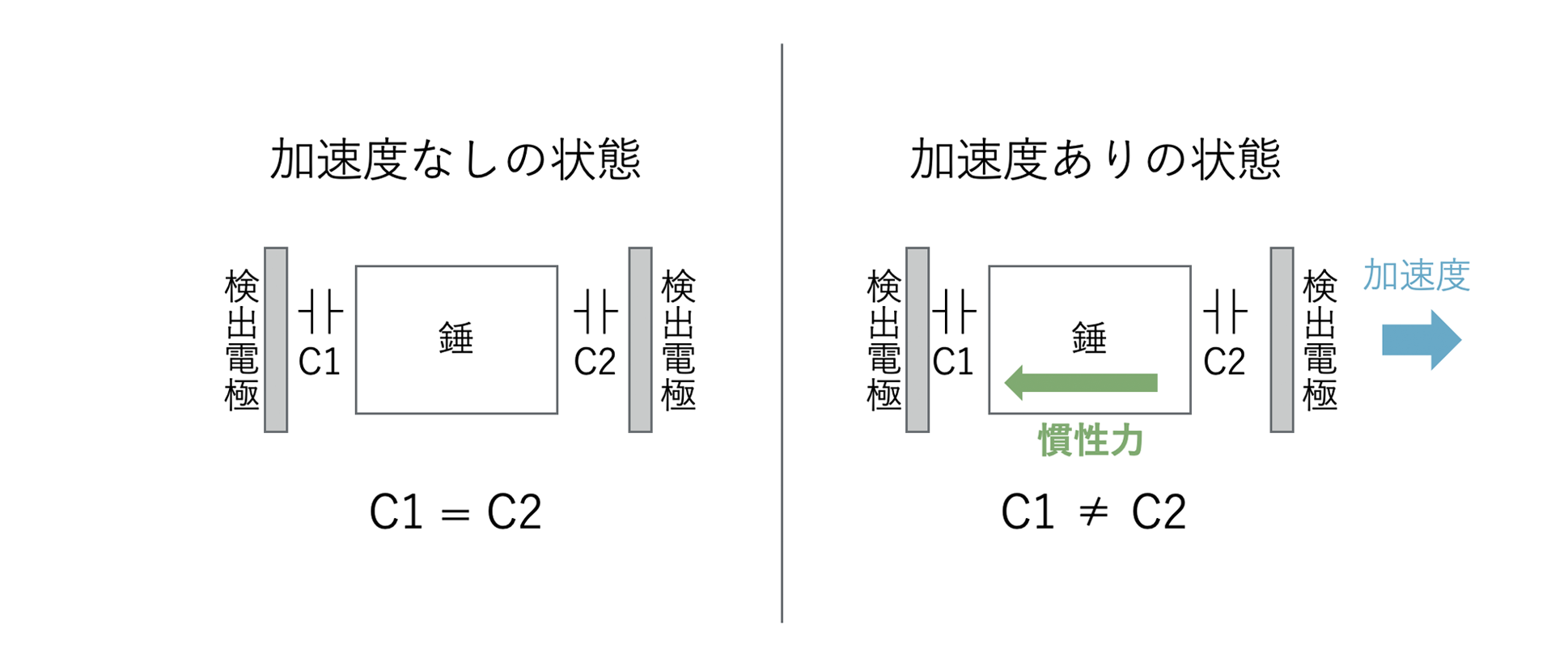
<加速度>
加速度0の状態では錘が検出電極間の中心にあるので、静電容量C1=C2となるが、加速度が加わると反対方向に慣性力が発生し、錘がずれることで検出電極と錘の距離が変化し、静電容量C1≠C2となります。この静電容量差を測定することで、加速度を算出します。
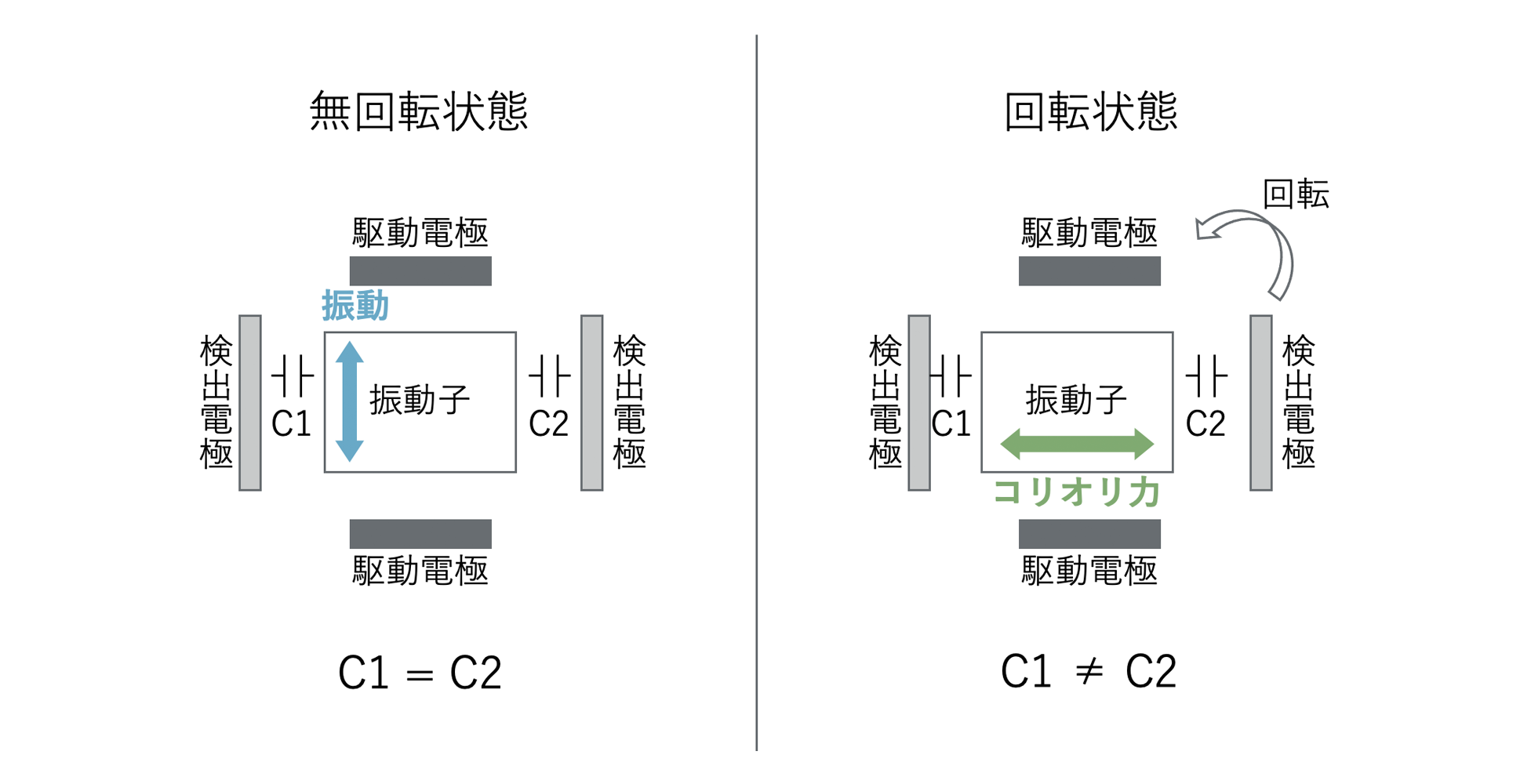
<角速度>
無回転状態で、駆動電極に矩形波の電圧を加えて振動子を一定周期で振動させた時、検出電極と振動子の間の静電容量C1=C2とします。そこに回転が加わると、コリオリ力が発生し、振動子がずれます。この時、検出電極と振動子の距離が変化し、静電容量C1≠C2となります。この静電容量差を測定することで、角速度を算出します。