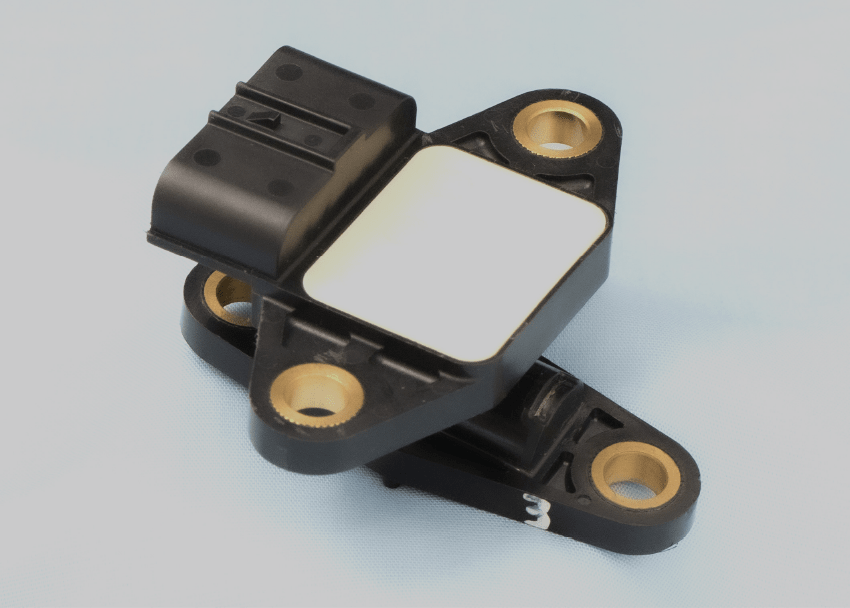
This section introduces inertial sensors that detect the attitude of a car body from acceleration and angular velocity.
It is based on the highly reliable packaging technology developed for rotation and position sensors,
and can also be adapted to CAN output by considering the signal conversion load in the vehicle ECU.
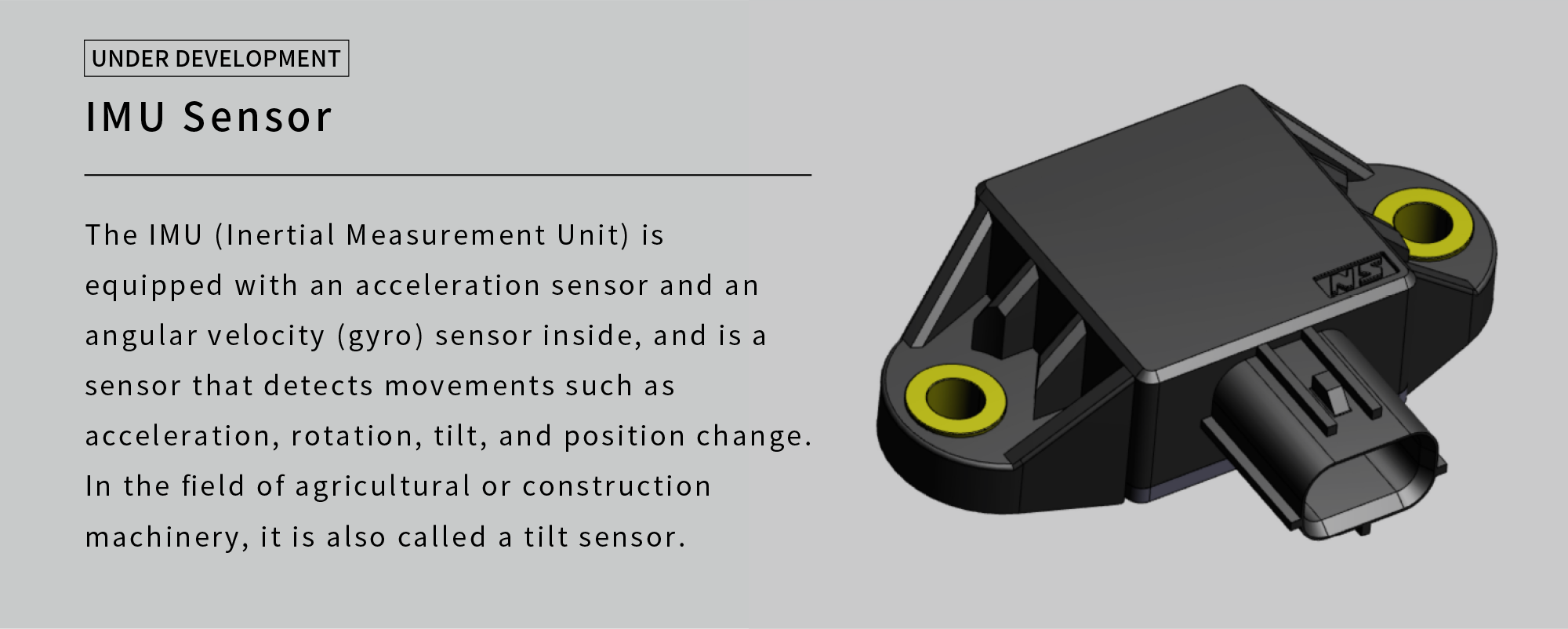
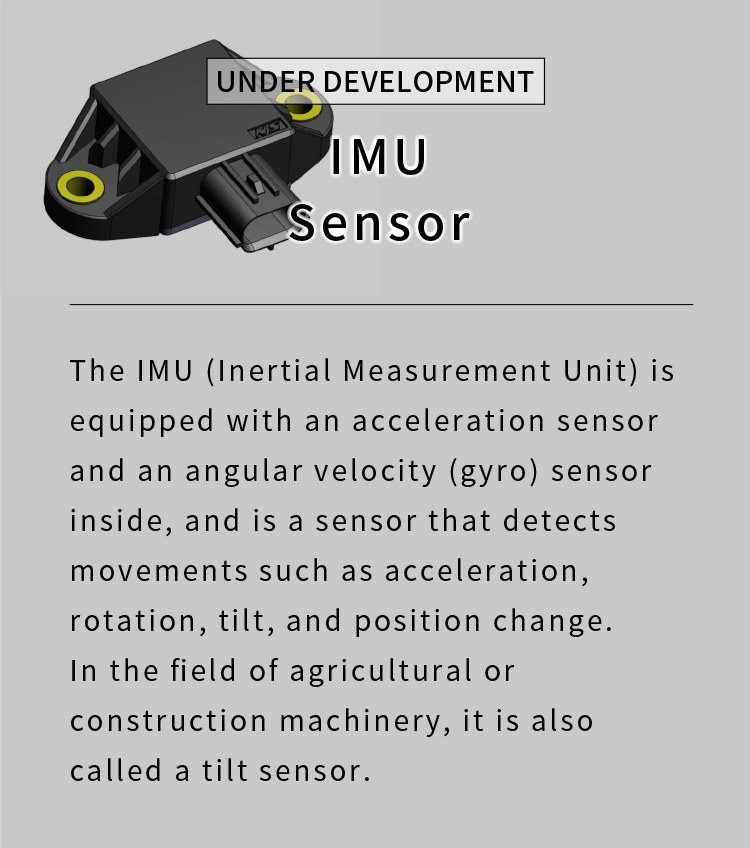
We are developing it for motorcycles, agricultural or construction machinery, etc., and have a lineup of IMUs to provide optimal sensors for various environments.
For in-vehicle use, it supports ASIL-B that complies with functional safety (ISO26262).
For agricultural or construction machinery, it also supports wireless type for easy installation.
In addition, since it also has a temperature sensor inside, it is possible to detect temperature as well as acceleration and angular velocity.
| Features | TYPE name | Axes | Power supply | Output |
| For motorcycles | IM-1 | 6 axes | Wired | CAN |
| For agricultural or construction machinery |
IM-2 | 6 axes | Wired/Battery | Wired/Bluetooth etc. |
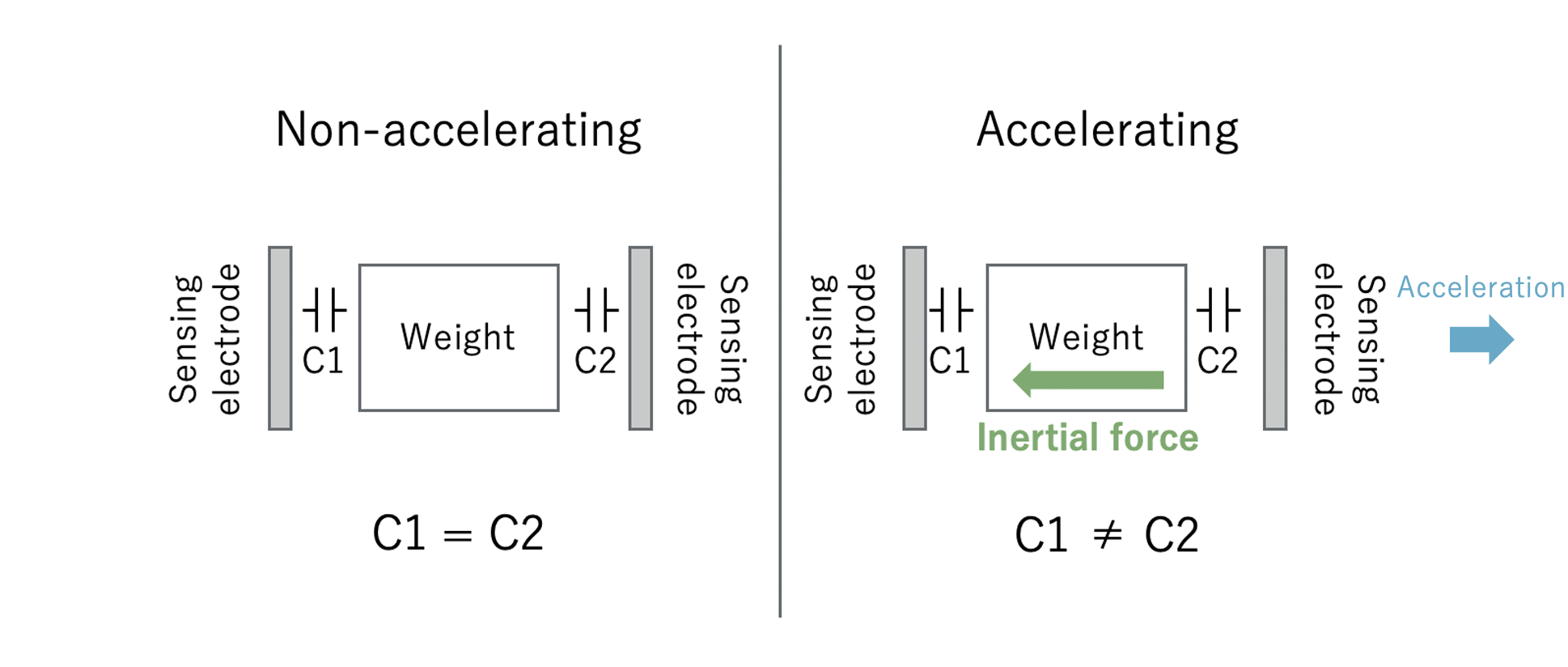
<acceleration>
In the state of 0 acceleration, the weight is in the center between the detection electrodes, so the capacitance C1 = C2, but when acceleration is applied, an inertial force is generated in the opposite direction, and the weight shifts to the detection electrode. The distance of the weight changes, and the capacitance C1 ≠ C2.
Acceleration is calculated by measuring this capacitance difference.
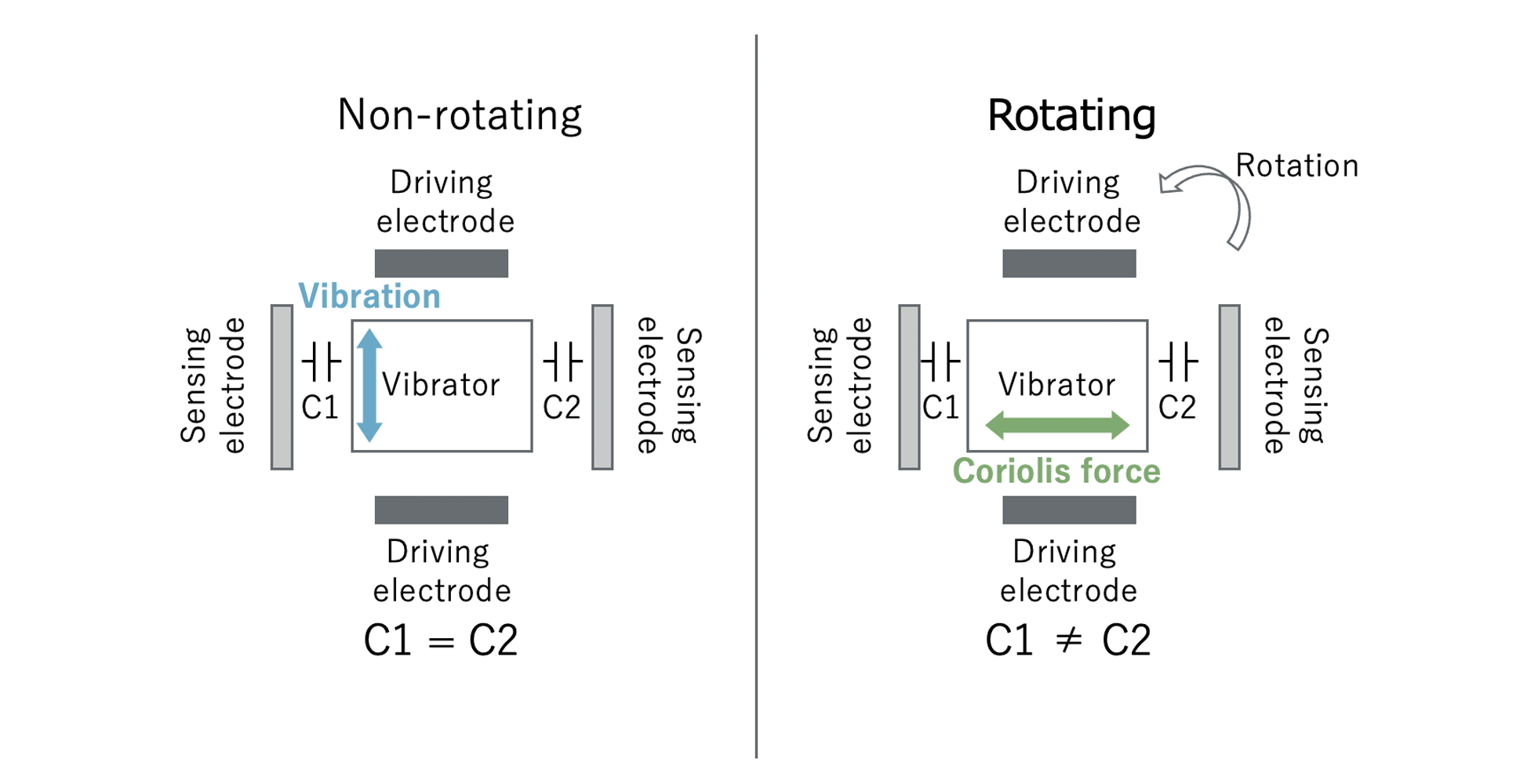
<angular velocity>
When a square wave voltage is applied to the drive electrode and the vibrator is vibrated at regular intervals in the non-rotating state (1), the capacitance between the detection electrode and the vibrator is C1 = C2. If a Coriolis force due to rotation is generated there (2), the vibrator will shift. At this time, the distance between the detection electrode and the vibrator changes, and the capacitance C1 ≠ C2.
The angular velocity is calculated by measuring this capacitance difference.